生产管理机械化岗位
徐丽明 袁全春 刘星星 牛丛 马帅 曾鉴 陈晨 袁训腾
引言
应用离散元法研究有机肥与施肥机械的作用机理需要在EDEM软件中建立有机肥模型,模型参数的准确性将直接影响研究结果的可靠性。模型参数包括材料本征参数、接触参数和接触模型参数,其中接触参数和接触模型参数需要通过仿真试验进行标定。
本文拟针对样品有机肥,应用EDEM软件,选择“Hertz-Mindlinwith JKR”凝聚力接触模型,进行Plackett-Burman Design、最陡爬坡试验和Central Composite Design等仿真试验,并结合休止角物理试验对有机肥离散元模型参数进行标定。以期获得较为准确的有机肥离散元模型参数,为有机肥离散元模型数的选取提供参考。
1 材料与方法
1.1 有机肥基本参数

本文所用有机肥为兰州紫龙珠葡萄合作社的羊粪发酵有机肥,基本参数如表1。
1.2 试验方法
本文首先进行物理试验,采用圆筒提升的方法获得有机肥颗粒堆,并测量实际休止角。然后进行仿真试验,通过Plackett-BurmanDesign、最陡爬坡试验和CentralComposite Design试验建立并优化有机肥休止角与显著性参数的回归方程,以实际休止角为目标值对回归方程求解寻优,得到显著性参数最优值。最后在标定的参数下进行仿真试验,验证标定的模型参数的准确性。
1.3 有机肥休止角物理试验
试验时,首先使钢质圆筒底面与钢板接触,然后向钢质圆筒内填充有机肥直至填满。使用万能试验机将钢质圆筒以20mm/s的速度向上提升,从而使有机肥形成一个颗粒堆,并测量休止角。该试验重复10次,取平均值,得到实际休止角为38.15°。

1.4 仿真模型
有机肥颗粒间受水分和化学物质的作用存在粘附现象,本文选择凝聚力接触模型“Hertz-Mindlinwith JKR”接触模型。有机肥颗粒近似球形,以半径1mm的基本球体作为有机肥模型。在SolidWorks中建立钢质圆筒和钢板的三维模型,作为结构模型。通过试验和查阅相关文献,得到有机肥和钢板的本征参数。
1.5 仿真试验
(1)Plackett-Burman Design筛选显著性参数通过综合对比参考文献中肥料和本文中有机肥特性的差异,确定了接触参数的取值范围(有机肥-有机肥恢复系数0.4-0.8、有机肥-有机肥静摩擦系数0.3-1、有机肥-有机肥滚动摩擦系数0-0.3、有机肥-钢板恢复系数0.4-0.8、有机肥-钢板静摩擦系数0.5-0.9和有机肥-钢板滚动摩擦系数0-0.3),并通过仿真预试验确定了JKR的取值范围(0-0.04)。共7个因素,各取1个高水平、1个低水平,并选择1个中心点,设置4个空白列用于误差分析,共进行13次试验。对试验结果进行方差分析,其中对休止角影响显著的参数有有机肥-有机肥滚动摩擦系数、JKR和有机肥-钢板滚动摩擦系数。
(2)最陡爬坡试验确定显著性参数最优值区间将3个显著性参数按照选定步长逐步增加(参数影响效应是正效应),其余参数选择中间水平进行最陡爬坡试验,并计算有机肥仿真休止角与实际休止角的相对误差。结果表明,仿真休止角与实际休止角的相对误差先减小后增大。所以,响应面分析试验的因素水平选为:有机肥-有机肥滚动摩擦系数(0.05,0.10,0.15)、JKR(0.01,0.015,0.02)和有机肥-钢板滚动摩擦系数(0.05,0.1,0.15)。
(3)响应面分析试验建立回归模型求解显著性参数最优值根据最陡爬坡试验结果,进行Central Composite Design响应面分析试验。试验中,非显著性参数同样选择中间水平,选择6个中心点进行误差估计,共进行20次试验。对试验结果进行分析,得到二次回归模型和方程,该线性回归模型P<0.01,说明回归模型是极显著的;失拟项P=0.051 9>0.05,说明所得回归方程拟合性较好。本试验的变异系数CV=2.06%,故本试验可靠性较好;决定系数R 2=0.965 5和校正决定系数R2adj=0.934 5,接近1,故所得回归方程可靠度较高;精确度Adeq Precision=20.458,故该回归模型精确度良好。通过剔除影响非常不显著的项,并尝试添加三次项对二次回归模型进行优化。优化后的回归模型失拟项P=0.405 6、变异系数CV=1.30%、决定系数R 2=0.980 7、校正决定系数R 2adj=0.973 8、精确度AdeqPrecision=45.591。较优化前,有很大改善。
以有机肥实际休止角为目标对优化后的回归方程求解寻优,得到3个显著性参数的最优值,有机肥-有机肥滚动摩擦系数为0.10,JKR为0.015,有机肥-钢板滚动摩擦系数为0.11。
2 验证试验
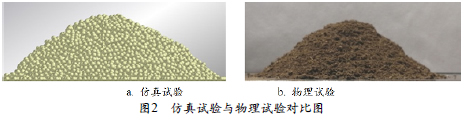
为了验证所得3个显著性参数最优值的准确性,本文将3个显著性参数设置为最优值,非显著性参数同样选择中间水平,其他设置不变,进行休止角仿真试验,测得仿真休止角为37.99°。与有机肥实际休止角38.15°的相对误差为0.42%,无显著性差异,说明所得3个显著性参数的最优值准确可靠。
3 结论
(1)通过Plackett-BurmanDesign筛选出对有机肥休止角有显著影响的接触参数和模型参数包括:有机肥-有机肥滚动摩擦系数、JKR和有机肥-钢板滚动摩擦系数。
(2)通过最陡爬坡试验确定了3个显著性参数的最优值区间,通过Central Composite Design响应面分析试验建立并优化了有机肥休止角与显著性参数之间的回归模型。分析发现,除了3个显著性参数对有机肥休止角影响显著外,有机肥-有机肥滚动摩擦系数的二次项和三次项对有机肥休止角也有显著影响。
(3)以有机肥实际休止角为目标值,对优化后的回归方程进行寻优求解,得到3显著性参数的最优值,有机肥-有机肥滚动摩擦系数为0.10,JKR为0.015,有机肥-钢板滚动摩擦系数为0.11。验证试验结果表明,有机肥仿真休止角与实际休止角无显著差异,所标定的有机肥离散元模型参数准确可靠。