生产管理机械化岗位
徐丽明 马帅 闫成功 谭好超 沈聪聪 刘星星
针对当前葡萄苗木栽植作业过程中存在的劳动强度大、作业效率低等问题,设计一种株距可调式葡萄苗木栽植机。
1 整机结构和工作原理
1.1 葡萄苗木的外形尺寸及栽植的农艺要求
根据栽植农艺要求对葡萄苗木进行修剪后,随机选取30根生长状况良好的葡萄苗木,测量其外形尺寸,包括苗高h1、根长h2、主茎茎粗d、茎部最大宽度b、根部最大宽度B和叶子情况。栽植株距为100~200 cm,栽植的直立度要求主茎垂直于地面,主茎与地面的夹角小于30°时,视为倒伏苗,埋土深度为15 cm,栽植频率不小于30株/min。
1.2 整机结构
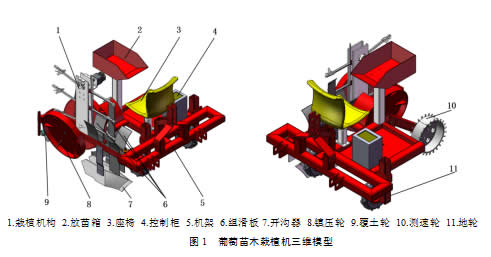
株距可调式葡萄苗木栽植机的整机结构(图1),由栽植机构、放苗箱、座椅、控制柜、组滑板、开沟器、镇压轮、覆土轮、测速轮、机架、地轮等部分组成,电机转速由STM32单片机通过测速轮的转速和株距值共同调节。
1.3 工作原理
葡萄苗木栽植机通过三点悬挂装置与拖拉机挂接,通过鳄鱼钳连接拖拉机上的蓄电池,为控制柜供电。作业前,投苗人员将适量的葡萄苗木放入放苗箱,通过控制柜上的触摸屏输入预期的株距值。工作时,开沟器开出一条宽度为12 cm、深度为10~15 cm的长沟,与此同时,投苗人员将葡萄苗木放在栽植机构的苗夹上,苗夹随主动链轮转动,当苗夹进入组滑板时,苗夹夹紧,当苗夹转动到垂直状态时,苗夹从组滑板中滑出,苗夹张开,完成投苗。葡萄苗木在组滑板的保护下,其根部和茎部可以顺利的通过机架,进入开沟器,降低伤苗率。控制部分主要是用STM32 F103系列的单片机作为控制核心,通过接收编码器的电信号(编码器与测速轮连接)和预期输入的株距值,实时调节电机转速,从而驱动主动链轮转动。此后,镇压轮和覆土轮分别完成镇压和覆土工作,以此为一个循环进行栽植作业,直至栽植工作全部完成。
1.4 主要工作参数
根据葡萄苗木栽植要求和农艺要求,确定了栽植机的主要技术参数。
2 关键部件设计
2.1 栽植机构
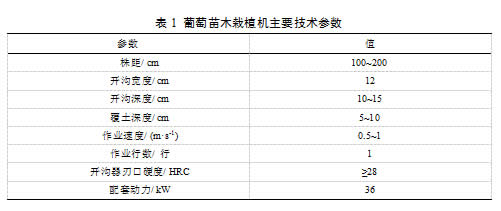
栽植机构主要由苗夹、下传动轴、挡板、链传动、上传动轴等组成(图2),上传动轴为主动轴,链条上均匀分布有6跟苗夹。
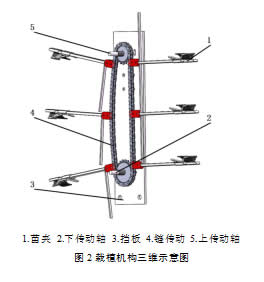
2.2 护根式开沟器
葡萄苗木的栽植深度要求为15~20 cm,葡萄苗木根部的最大宽度B为6 cm,在工作过程中,葡萄苗木从开沟器的中间通过,所以合理的开沟器宽度为12 cm,同时,考虑到开沟器的开沟阻力和加工的可行性,因此,设计芯铧式开沟器的长度为60 cm,加工时要求开沟器刃口硬度≥28 HRC。
2.3 开沟器与栽植机构相对位置
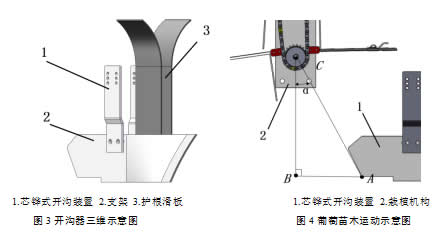
2.3.1 葡萄苗木栽植过程运动分析
苗夹完成投苗前的一段时间里,苗夹绕链传动的下链轮旋转,在这段时间里,葡萄苗木经历了从开始埋土到完成埋土的过程,拖拉机前进的距离LAB。如图9所示,A点为开始埋土点,B点为完成投苗的位置点,C点为链传动下传动轴中心点;直线AC为苗夹夹紧葡萄苗后,整体的位置线,直线AB为从开始埋土到完成埋苗这段时间里,拖拉机的前进距离;α为从开始埋土到完成埋苗这段时间里,葡萄苗木绕下链轮转过的角度。
为了简化计算,将栽植机的工作过程看作匀速直线运动。
当设定葡萄苗木的株距值为100 cm时,拖拉机的前进速度为0.5 m/s,苗夹的转速为0.33 r/s。此时,α与LAB满足的关系式为:
整理得:;同理得,当设定的株距值分别为150 cm和200 cm时,关系式分别为:和。
2.3.2 开沟器与栽植机构相对位置确定
从株距值100~200 cm之间,选取100、150和200 cm三个株距进行开沟器与栽植机构相对位置确定。通过选取不同角度α,计算得到拖拉机前近距离的理论值,同时,测量拖拉机前近距离的实际值LAB',通过分析可知,角度α越小,的相对误差值LAB'-LAB越小。

3 基于人机交互的株距可调式控制系统
结合葡萄苗木栽植机的实际情况,设计了一种包括人机交互功能、信号采集功能、信号处理功能、动作执行功能和串口输出功能的控制系统[26-29]。
栽植机的栽植频率为30株/min时,能够满足整机性能要求,同时也是操作熟练的投苗人员最舒适的投苗频率。主动链轮的最高转速。当栽植机的栽植株距为100~200 cm时,拖拉机的最大前进速度为0.5~ 1 m/s,测速轮的最高转速满足:

式中 n1——测速轮转速,r/min
V——拖拉机的最大前进速度,m/s
D——测速轮的外径,m
由公式(2)计算得测速轮的最高转速约为29.84 ~59.68 r/min。
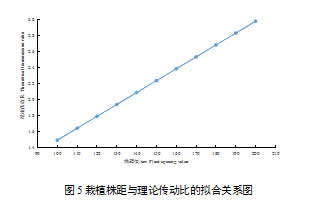
测速轮与主动轮的传动比满足为:

式中 i——传动比
n1——测速轮转速,r/min
n2——主动链轮转速,r/min
计算得不同株距对应得理论传动比满足图5所示的曲线,此数据为控制系统软件功能实现提供理论支持。
3.1 控制系统硬件设计
基于人机交互的株距可调式控制系统主要由触摸屏、编码器、控制器、电源模块、电机驱动器和直流无刷减速电机等部分组成,如图6所示。控制器选用 STM32 F103ZET6 单片机(72 M 主频,144 引脚,供电电源DC12 V),实现定时、计数脉冲和输出 PWM 信号的功能要求。触摸屏选用M系列串口屏 DC80480M070_2111_0C ,采用400M SOC处理器;编码器选用 E6B2-CWZ3E 增量式光电旋转编码器,脉冲为 1000 P/R;直流无刷减速电机,选用XCDQ 型直流无刷电机(电压 DC24 V,额定转矩为0.28 N·m,额定转速为2000 r/min),减速器减速比为 1:100,;选用 DBL-30驱动器,可外接 PWM 信号驱动直流无刷电机调速。电源模块包括 12 V 直流电源和 12 V 转24 V 升压模块,拖拉机自带蓄电池为 12 V 直流电源。
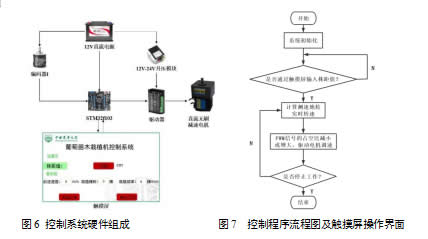
3.2 控制系统软件设计
本控制系统设计的控制程序流程图如图7所示。
4 田间试验
试验于2021年7月在山东省日照市莒县葡萄园进行(图8)。试验设备有TDR150土壤水分速测仪(量程0~50%,精度±2%,分辨率0.1%)、卷尺、秒表、500 mm直尺、铁锹、量角器等。试验区为长度60 m的地块,土壤质地类型为轻壤土,测定土壤含水率为15~20%。
从株距值100~200cm之间,选取100、150和200 cm三个株距进行田间试验。试验配套的动力为山拖泰山 TS404 拖拉机,平均作业速度根据选择的株距值不同依次为1 m/s、0.75 m/s、0.5 m/s。结合现行的林业机械自行式苗木移栽机的设计标准LY/T 1933-2019[18]和机械行业旱地栽植机械的设计标准JB/T 10291-2013[30],对机器作业质量进行评价。试验结果表明,葡萄苗木栽植机的作业性能,能够达到设计要求(图9)。

5 结论
(1)设计了一种株距可调式葡萄苗木栽植机,根据葡萄苗木的外形尺寸和栽植的农艺要求,选择葡萄苗木较直的茎部作为夹持位置,确定了苗夹的尺寸和形状,为了降低葡萄苗木的倒伏率,提升苗木的栽植直立度,确定了开沟器与栽植机构的安装位置,确定了株距值分别为200 cm、150 cm和100 cm时,角度α分别取7.7°,10°和12.3°,安装孔距离开沟器后端的距边距离b分别为245 cm,267.5 cm和290 cm,符合设计要求。
(2)基于葡萄苗木栽植的农艺要求,设计了株距可调式控制系统,提高了栽植株距的准确性及株距调节的便利性,投苗人员可以根据需求选择100~200 cm作为株距值。
(3)在直流电机转速静态标定试验中得到了电机转速与 PWM 信号占空比的对应关系;栽植精度、栽植频率和栽植质量的测定实验表明,当设定的株距值分别为200 cm、150 cm和100 cm时,栽植的实际株距均值为200.07 cm、150.08 cm和100.18 cm,株距变异系数均值为0.01%、0.02%和0.03%,栽植深度均值为18 cm,栽植深度合格率均值为97.67%、98%和97.34%,最大栽植频率为30株/min,漏栽率、重栽率、露苗率和伤苗率均为0,倒伏率均值为1.33%、1.67%和1.33%,埋苗率均值为1%、0.67%和1.33%,均满足葡萄苗木栽植的作业要求。