生产管理机械化岗位
徐丽明 赵诗建 马帅 牛丛 闫成功 谭好超 沈聪聪 刘星星
1.葡萄株间避障除草机的PID避障控制系统设计
本团队先前研究的避障控制程序采用开关控制避障动作,避障行程固定在液压缸最大行程,无法根据障碍物位置精确控制避障动作行程,除草机避障作业时存在空行程(实际动作行程—理论动作行程)作业,导致植株周围存在的未除杂草面积较大,株间除草作业覆盖率可进一步提高。
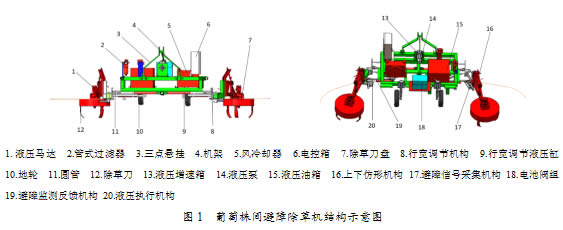
针对上诉问题,本文优化设计了葡萄株间避障除草机整体结构(图1),主要由机架、液压系统、电控系统、上下仿形机构、行宽调节机构、仿形地轮、避障信号采集机构、液压执行机构、避障监测反馈机构和除草刀盘等组成。依据仿形控制原理对避障控制系统进行优化,设计一种由避障信号采集部分、程序控制部分、液压执行部分、避障监测反馈部分等组成的PID避障控制系统,除草作业的原理是采用避障信号采集机构实时采集作物植株的精确位置,并将位置信号传递给程序控制部分,经程序计算得出理论动作行程信号,进而控制液压执行机构的动作行程大小与动作速度,同时避障监测反馈机构实时监测液压执行机构实际动作行程,反馈至程序控制部分与理论动作行程对比做差,进而对实际避障动作进行精确调整,形成闭环控制系统,确保避障过程精准实现。除草刀盘精准的围绕作物植株进行避障除草作业,减小避障空行程作业造成的未除杂草面积,实现避障除草作业的精确控制,提高除草作业覆盖率,避免果树损伤。
1.1 避障数学模型
为模拟除草作业过程除草刀盘避障运动轨迹,选取较优除草刀盘转速,利用RecurDyn建立除草机虚拟样机仿真模型,对避障除草过程进行仿真试验与分析。综合考虑除草作业覆盖率与除草刀盘功率消耗,选取除草刀盘转速为200 r/min,除草作业覆盖率高、除草刀盘功率消耗小。先前研究除草作业覆盖率约为90.02%,经对比分析可得,当除草刀盘根据障碍物位置仿行避障的理想状态下,除草作业覆盖率可达94.85%,较先前研究明显增加;同时分析避障轨迹可得出除草刀盘旋转中心O最大竖直运动距离D,为PID避障程序的编写与液压系统的优化设计提供参考。为保证与前文研究一致性,将评价指标除草作业覆盖率定义为

式中Mc为除草作业覆盖率,%;S为应除草面积,mm2;S2为未除杂草面积mm2;
1.2 避障信号采集机构、液压执行机构、避障监测反馈机构对应关系
如图2-a所示,触杆旋转中心A与避障位移传感器安装点B、C组成一个三角形,β为触杆未触碰障碍物时避障位移传感器所在边BC对应角初始值。除草机进行避障作业时,触杆与障碍物接触受力转动的同时带动避障位移传感器所在边BC变化,β也随之变化,避障位移传感器产生电压信号传递给控制系统,控制系统将信号转换成理想动作行程信号输出。避障信号采集机构几何关系对应公式如下:
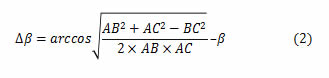
式中,AB为触杆旋转中心A与避障位移传感器安装点B的距离,mm;AC触杆旋转中心A与避障位移传感器安装点C的距离,mm;BC为避障位移传感器器安装点B与C的距离,mm;β为触杆未触碰障碍物时避障位移传感器所在边BC对应角初始值,°;
如图2-b所示,液压执行部分中除草刀盘旋转中心D与避障液压缸安装点E、F组成一个三角形,θ为除草部件未进行避障作业、株间除草状态时避障液压缸所在边EF对应角初始值。控制系统转换输出理想动作行程信号到液压执行机构,避障液压缸执行避障动作,避障液压缸所在边EF变化,θ也随之变化。避障液压缸动作的同时,同步动作的避障监测位移传感器将实际动作行程信号实时监测反馈到控制系统,与理想动作行程相比较,实现精确避障。液压执行机构几何对应公式如下:

式中,DE为除草刀盘旋转中心D与避障液压缸安装点E的距离,mm;DF为除草刀盘旋转中心D与避障液压缸安装点F的距离,mm;EF为避障液压缸安装点E与F的距离,mm;θ为除草部件未进行避障作业、株间除草状态时避障液压缸所在边EF对应角初始值,°;
避障信号采集机构实时采集β变化信号,通过避障位移传感器将角度变化信号∆β转换成电压信号传递给控制系统,通过控制系统计算液压执行机构理论动作行程,并将信号转换输出到液压执行机构,控制液压执行机构中θ角变化∆β大小,同时避障监测反馈位移传感器反馈实际动作行程到控制系统,实现避障过程的精确控制。
根据PID避障控制系统的工作原理,分别进行液压系统设计、控制系统硬件设计、控制系统软件设计。
2 PID避障程序调试试验
为保证安全避障,液压缸伸缩动作都应留出5 mm剩余行程,防止液压缸全部伸缩状态时,因动作速度较快产生冲击震荡,对液压缸和监测反馈位移传感器造成损坏。即标定避障液压缸、监测反馈位移传感器的有效行程范围为5~145 mm,信号采集位移传感器有效行程为0~70 mm。
为了提高系统的精确避障能力,根据系统闭环传递函数,按照系统稳定性的要求,采用PID控制算法对避障液压缸的动作速度、行程大小进行调节,以实现精确避障;采用“先比例后积分,最后再微分”的调整顺序,进行PID参数整定。确定最优PID参数组合为:P=0.0343; I=127.78; D=0。
3 田间试验
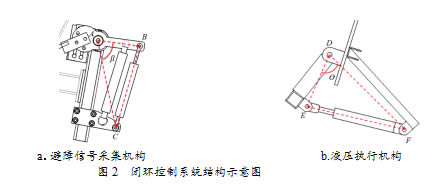
为验证机器的优化参数,加工物理样机,于 2021 年6月在河北省涿州市中国农业大学科研试验基地进行田间试验,避障除草作业试验现场及样机如图3所示。试验现场包括行距3 m、株距1 m 的葡萄果树行;试验仪器和设备包括株间自动避障除草机样机、时风风云504拖拉机、卷尺(0~5 m,精度为1 mm)、位移传感器 KPM-75 、KPM-150(精度为 0.1 mm)、电脑 Dell G3。

以机器作业速度为试验因素,除草作业覆盖率、果树损伤率为评价指标进行田间试验,每个机器作业速度水平进行3组有效试验,结果取平均值。为保证田间试验与仿真试验的一致性,除草作业覆盖率的计算方法与仿真试验相同;由果树生长的生物学特性可知,当果树树干出现韧皮层裸露或断裂时,果树损伤,以此标准验证除草机避障作业时除草刀盘对果树的损伤情况,计算果树损伤率

式中Z为果树损伤率,%;X为损伤果树数;Y为避障除草作业总果树数。
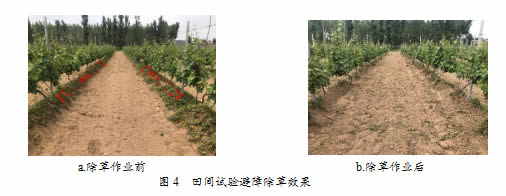
在除草机作业前,结合篱架式葡萄栽培模式和浅松除草的技术要求,对除草作业行宽、入土深度进行调节。除草机作业后,葡萄树干周围只存在极小部分杂草未得到清除,除草作业覆盖率得到大幅度提高。机器作业行外侧的杂草,当机器返程作业在相邻行时,可将其良好清除。除草机在相邻行往返作业后,可使中间葡萄行周围和株间杂草彻底清除,达到理想除草效果。田间试验避障除草效果如图4所示。
由试验结果分析可得,机器作业速度为260 mm/s、320 mm/s、380 mm/s、440 mm/s的平均除草作业覆盖率分别可达94.82%、94.36%、93.97%、92.60%,与先前研究相比,除草作业覆盖率分别提升5.33%、4.82%、4.39%、2.87%。葡萄园中果树生长弯曲角度不同,葡萄树干弯曲至接近地表状态时,信号采集机构对其识别准确率下降,除草刀与树干发生碰撞,使葡萄树干出现韧皮层裸露,造成果树损伤。除草机以各机器作业速度均进行两行葡萄的除草作业,通过统计葡萄树干总数和损伤葡萄树干数目,计算果树损伤率;机器作业速度为260 mm/s、320 mm/s、380 mm/s、440 mm/s的果树损伤率分别为1.67%、1.78%、1.92%、2.08%;机器作业速度对果树损伤率的影响甚微,除草机在各机器作业速度下均可实现精确避障除草作业,有效避免对果树的损伤。
由试验结果分析可得,随着机器作业速度增加,除草作业覆盖率逐渐降低。机器作业速度在260 mm/s、320 mm/s和380 mm/s 3个水平下,除草作业覆盖率相差甚微,但机器作业速度为380 mm/s时,除草作业效率显著提高;当机器作业速度为440 mm/s时,虽然除草作业效率提高,但除草刀盘避障动作频繁,导致株间未除杂草面积增加,除草作业覆盖率下降幅度较大;综合分析可得,机器作业速度取380 mm/s时,除草作业覆盖率与机器作业效率综合效果最佳。
4 结论
(1)本文优化设计了一种PID避障控制系统,主要由避障信号采集部分、程序控制部分、液压执行部分、避障监测反馈部分等组成。基于仿形控制原理与避障的工作要求,建立避障数学模型,通过程序控制部分编写避障信号采集部分、液压执行部分、避障监测反馈部分三者之间的关联式,确定PID避障闭环控制方案;进行液压系统、电控系统等关键部件的优化设计与型号选取。
(2)在机器静态调试时,标定避障信号采集位移传感器、避障液压缸、避障监测反馈位移传感器的有效行程分别为0~70 mm、5~145 mm、5~145 mm;并对PID参数进行整定,确定最优PID参数组合为 P=0.0343; I=127.78; D=0。实现避障动作准确、快速、稳定的运行。
(3)加工物理样机并进行田间试验,以机器作业速度为试验因素,除草作业覆盖率和果树损伤率为评价指标进行田间作业性能测试。除草作业完成后,根据除草前后葡萄树干周围杂草覆盖面积和果树损伤情况,测量计算除草作业覆盖率与果树损伤率的大小,最终确定最优机器作业速度为380 mm/s,平均除草作业覆盖率可达93.97%,与先前研究相比,除草作业覆盖率提高4.39%;果树损伤率为1.92%,除草机可良好实现避障除草作业。