生产管理机械化岗位
徐丽明 牛丛 马帅 闫成功 谭好超 沈聪聪 刘星星
1 总体结构与工作原理
1.1 整机结构
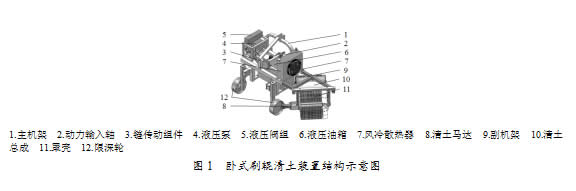
卧式刷辊清土装置结构(图1),由主机架、动力输入轴、链传动组件、液压系统、副机架、清土总成以及限深轮等组成。液压系统包括液压泵、液压阀组、液压油箱、风冷散热器和清土马达,其中液压泵、液压阀组、液压油箱以及风冷散热器安装于主机架上,清土马达安装于副机架上。动力输入轴安装于主机架前端,链传动组件连接动力输入轴和液压泵,2个限深轮分别位于主机架后方两侧,支撑整机并调节机组的作业高度。副机架与主机架通过方管套接,副机架伸出主机架的长度可调。清土总成安装于副机架右侧底部,主要由刷辊和防堵装置构成。调节副机架伸出主机架的长度可调节清土总成作业位置。罩壳安装于副机架左侧,控制土壤抛撒方向。
1.2 工作原理
作业时卧式刷辊清土装置通过主机架前端的三点悬挂与拖拉机挂接,并由拖拉机牵引前进。拖拉机输出的动力经动力输入轴和链传动组件传递至液压泵,液压泵将机械能转化为压力能驱动清土马达转动;液压油箱为液压系统提供液压油源;液压阀组和风冷散热器均由车载12 V电源供电,前者控制液压马达的转速和转向,后者在作业过程中为液压系统降温以提高液压系统工作的稳定性和可持续性。清土马达带动清土总成旋转,刷辊与防堵装置同向同步转动,分别清理作业前方左侧和右侧防寒土,二者配合将作业区域内葡萄藤上方的覆土抛撒到左侧行间,罩壳聚拢被抛撒的土壤,使其按照一定的轨迹落回取土行间。
2 清土总成设计
2.1 结构与安装形式
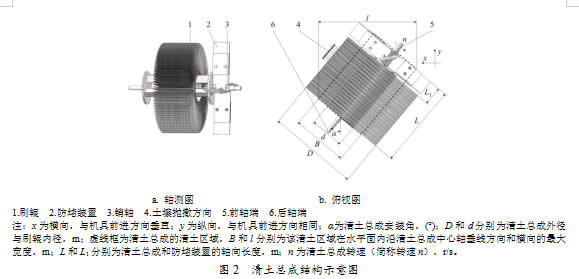
清土总成结构如图2所示,其安装角α影响清土宽度和清土效果,其取值范围为30°~60°。设计清土总成轴向长度L为0.5 m,刷辊与防堵装置的外径D均为0.55 m,刷辊内径d为0.2 m,故单边刷丝长度为0.175 m,大于土垄高度0.1 m,满足清土厚度要求。
2.2 刷辊抛撒土壤运动学分析
为确保被抛撒土壤顺利落回取土行间,对刷丝末端抛撒土壤颗粒的瞬时运动进行分析。以不考虑刷丝变形情况为基础,建立土壤颗粒斜抛运动轨迹方程,推导斜抛运动最大水平横向距离和最大高度。以清土要求和土壤颗粒不产生回抛为条件,确定刷辊转速n取值范围为168~550 r/min。经对比分析,刷丝变形时的刷辊转速范围仍被未考虑刷丝变形时的转速范围包含,这意味着以较大的转速范围进行仿真试验,结果仍然正确且合理。刷辊转速一定,机具前进速度较大时刷辊来不及清土,较小时作业效率较低,兼顾作业效率和清土效果,其取值范围为0.3~0.8 m/s。
2.3 防堵装置
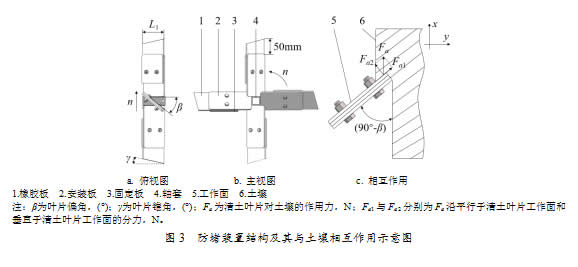
如图3所示,防堵装置为中心对称结构,由轴套和4个清土叶片组成。清土叶片工作面与轴套中心轴的夹角为β(简称“叶片偏角β”),取值范围为0°~40°。清土叶片包括安装板、固定板和橡胶板,安装板均匀焊接在轴套外周,与固定板夹持安装橡胶板。橡胶板伸出固定板长度为50 mm,轴向宽度与防堵装置相同;橡胶板前端设置锥角γ(简称“叶片锥角γ”),取值范围为0~45°。防堵装置轴向长度L1(简称“轴向长度L1”)增大,有利于减少土壤壅积,但也会增大功率消耗,初步确定其取值范围为50~100 mm。
3 清土总成参数优化
3.1 EDEM-Recurdyn耦合仿真模型
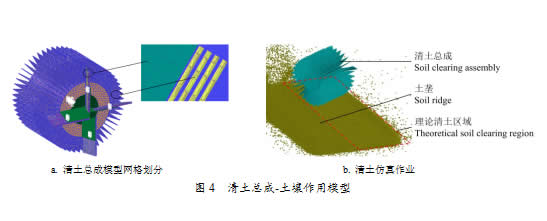
运用RecurDyn软件建立有限元柔性体模型,运用EDEM软件建立长3 m的土垄模型;二者耦合建立清土总成-土壤作用模型,模拟清土总成清土作业过程,如图4所示。
3.2 试验指标
清土总成作业性能主要体现在清土效果和功耗两个方面。清土效果以清土率Y1进行量化评价,清土率为实际清土质量与理论清土质量之比,清土率越高,则清土效果越好。功耗以清土总成的转动扭矩Y2进行评价,扭矩越大,则功耗越大。
3.3 Plackett-Burman试验
根据前文分析,设计Plackett-Burman 试验,对6个可能影响清土总成作业性能的因素进行筛选,得到影响较显著的4个因素为:机具前进速度v、转速n、安装角α和叶片偏角β。防堵装置的轴向长度和叶片锥角对清土率和扭矩影响均不显著,随轴向长度增大和叶片锥角减小,清土率增大,扭矩减小,清土总成作业性能越好,因此确定防堵装置轴向长度为0.1 m,叶片锥角为0°。
3.4 Box-Behnken试验
对筛选的4个影响较显著的因素进行Box-Behnken试验设计。依据试验结果建立清土率Y1、扭矩Y2的二次回归模型,并对模型进行方差分析。通过剔除影响不显著的项,优化二次回归模型,得到优化后的回归方程为:

3.5 参数优化
依据回归方程进行多目标优化求解,获得清土率最高、扭矩最低时的最优参数组合为:机具前进速度0.3 m/s、转速550 r/min、安装角30°、叶片偏角0°。以最优参数组合进行仿真试验,得到清土率和扭矩分别为86.72%和73.36 N·m。
3.6 仿真结果验证
2021年7月在山东省日照市进行田间试验,试验地土质与实际埋土土质相同。以仿真优化参数进行清土作业,结果表明,清土总成平均扭矩为78.62 N·m,与仿真优化结果的相对误差为7.2%。平均清土率为84.12%,与仿真优化结果的相对误差为3%。罩壳控制土壤抛撒水平横向距离小于1 m时不会产生较大扬尘。总体而言,仿真优化结果与田间试验结果基本一致,说明采用耦合仿真方法优化卧式刷辊清土装置结构与工作参数是可靠的,清土效果满足西北沟栽葡萄春季清土作业要求。
4 结论
(1)设计了一种适用于西北地区沟栽葡萄春季清土作业的卧式刷辊清土装置,该装置采用水平布置的柔性回转部件清除防寒布上方覆土,能够改善土垄顶部防寒土清除效果。
(2)基于EDEM-Recurdyn耦合仿真方法建立柔性清土总成-土壤作用模型,以清土率和清土总成的转动扭矩为试验指标,筛选出对作业性能影响较大的4个因素为机具前进速度、转速、安装角和叶片偏角,建立清土率和扭矩与各因素间的回归模型,以清土率最大和扭矩最小为优化目标,求解最优结构和工作参数组合为:机具前进速度0.3 m/s、转速550 r/min、安装角30°、叶片偏角0°,以最优参数组合进行仿真试验,得到清土率和扭矩分别为86.72%和73.36 N·m。田间试验表明,清土率和扭矩分别为84.12%和78.62 N·m,与优化结果的相对误差分别为3%和7.2%,作业效果满足要求。