生产管理机械化岗位
徐丽明 马帅 袁全春 刘星星 牛丛 闫成功 赵诗建
1 自动避障式葡萄藤防寒土清土机设计
1.1整机结构
自动避障式葡萄藤防寒土清土机主要由机架、避障摆动机构、避障信号采集机构、控制器、清土部件、挡土板、传动部件和限深轮等组成,整机结构如图1所示。避障摆动机构主要包括摆动支架和避障油缸,摆动支架通过中间旋转轴以铰接方式安装在机架的右侧,并将清土部件安装在摆动支架的最右端,清土部件采用柔性刷子和橡胶组合的结构形式;避障信号采集机构包括触杆、避障位移传感器、气弹簧和同步位移传感器等,同步位移传感器安装在避障油缸的底部并与其保持平行,以保证同步位移传感器和避障油缸的伸缩运动一致,触杆安装在摆动支架的前端,用于感知前方障碍物(水泥柱),当触杆转动的角度达到控制器中预先设定的阈值时,控制器通过控制电磁换向阀使避障油缸缩回,进而带动清土部件避开水泥柱;挡土板安装在机架底部,可以在机架底部的前后横梁上左右移动,用来防止被清除的土壤过度向清土部件在机架上安装位置的另一侧抛洒;传动部件采用2级带传动;2个限深轮分别安装在机架的后端两侧,通过调节限深轮,改变机具在作业过程中的离地高度,增强机具作业时的稳定性。

1.2工作原理
自动避障式葡萄藤防寒土清土机作业时,由拖拉机牵引前进,同时通过动力输出装置 (Power Take-Off,PTO)将动力传给变速箱,由变速箱输出轴将动力经2级带传动传给清土部件,从而实现其旋转清土的功能。在机具前进过程中遇到水泥柱时,触杆与其碰触,当系统检测到避障信号后,避障油缸缩回进而带动清土部件避开水泥柱,在避障油缸缩回的同时,同步位移传感器也随之缩回,当检测到避障油缸完全缩回时,电磁换向阀不通电,液压油卸荷;当避开水泥柱后,触杆和避障位移传感器在气弹簧的作用下恢复到初始位置,避障油缸带动清土部件伸出,同步位移传感器也随之伸出,清土部件重新进入水泥柱间进行清土作业,当检测到避障油缸完全伸出时,电磁换向阀再次断电,液压油卸荷,以此往复,完成葡萄藤防寒土的避障清土作业过程。
1.3 整机主要技术参数
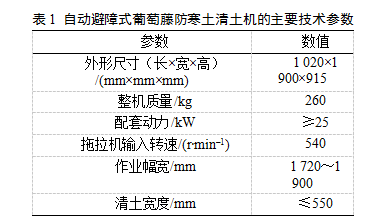
结合中国北方地区葡萄种植的行距和葡萄藤春季清土情况,确定自动避障式葡萄藤防寒土清土机的主要技术参数,如表1所示。
2 清土作业仿真试验
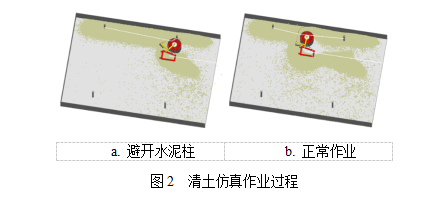
由清土机的作业过程可知,机器前进速度、避障油缸速度、清土部件转速、 STM32 单片机程序中预设的触杆转动角度阈值(当触杆转动角度大于等于该值时,避障摆动机构开始工作)和田间环境状况都可能会对清土作业效果产生一定的影响。为了分析各因素对清土作业效果的影响,进而为机具的优化及试验参数的选取提供参考依据,本文利用多体动力学软件RecurDyn和离散元软件EDEM耦合仿真试验,前者用来设置机具的运动参数,后者用来生成土壤颗粒模型并分析清土作业效果。仿真试验时,设置机具位于水泥柱的一侧进行作业,根据实际作业状态,先以某一常规工况进行仿真作业:在RecurDyn软件中设置机具前进速度为0.3 m/s,避障油缸速度为80 mm/s,清土部件转速为450 r/min,触杆转动角度阈值为8°,同时为保证仿真的连续性,设置仿真的时间步为500,总时间为10 s,由仿真试验结果可知,在机具前进过程中,不仅能够使清土部件顺利避开水泥柱,而且可将水泥柱侧边和水泥柱行间的土壤清除,图2a为机具避开水泥柱时的状态,图2b为机具避开水泥柱后正常清土作业的状态。
为分析影响清土机作业效果的主要因素,进而得到理想的作业参数组合,本研究选取机具前进速度v1(0.3~0.6 m/s)、避障油缸速度v2(60~100 mm/s)、清土部件转速n(350~550 r/min)和触杆转动角度阈值θ(5~10 °)为试验因素,以土壤清除率C为试验指标,采用4因素二次回归正交旋转中心组合模拟试验,共进行31组试验(0水平试验重复7次),采用Design-expert 8.0.6软件对试验数据进行分析,采用Quadratic模型建立土壤清除率C的回归模型。根据对土壤清除率C的分析结果可知,建立的回归模型有效,并且4个试验因素均对土壤清除率影响显著。利用Design-expert 8.0.6软件Optimization-Numerical模块对回归模型进行优化,以土壤清除率最大为寻优目标,得到4个试验因素的优化结果为机具前进速度0.43 m/s、避障油缸速度60 mm/s、清土部件转速550 r/min和触杆转动角度阈值9.96 °,此时最佳土壤清除率理论值为54.33%。为便于后期在田间试验中准确测定并验证触杆转动角度阈值大小,将其圆整为10°,根据优化得到的作业参数组合再次进行仿真试验,得其土壤清除率为54.65%,与理论值基本一致。
3 田间验证试验
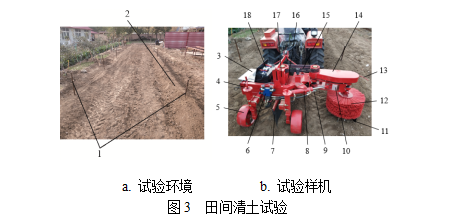
试验选用土壤质地为沙壤土,含水率在6%~8%之间,类似于葡萄园内的葡萄藤防寒土,试验前,采用直径为40 mm的圆管铁柱代替水泥柱,按行距3 m、前后间距3 m将其插在地上,共2行,每行5根,以此模拟葡萄园内的水泥柱行,其中一行用来试验机具的避障清土作业过程,另一行用来作为参照模拟葡萄行间,以验证挡土板能否将清土部件清除的土壤全部挡在行间。试验样机和试验环境如图3所示。
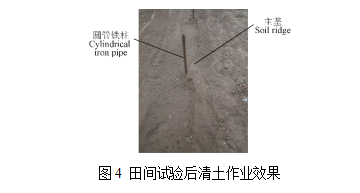
试验时,使机具的田间工作参数与仿真优化结果参数一致,清土作业完成后,作业效果如图4所示,从图中剩余土垄的边缘可明显观察到清土部件的避障运动轨迹,同时可看出水泥柱侧边和水泥柱行间的土壤被有效清除,此外,清土部件清除的土壤都被挡土板挡在了行间。此外,依据多点测量作业前和作业后土垄横截面面积的变化量计算田间试验土壤清除率的平均值为59.73%,与仿真优化试验结果的相对误差为8.50%,总体上表明此机具在田间以仿真优化得到的工作参数组合进行稳定作业能较好的完成葡萄藤防寒土的清除。
4 讨论
该研究是在土垄中没有埋入葡萄藤的前提下进行的,主要分析了自动避障式葡萄藤防寒土清土机的避障效果和土壤清除率,而在实际的葡萄园内,入冬前是先将修剪后的葡萄藤下架压在地面,然后采用葡萄藤埋土机对其进行覆土,压在地面上的葡萄藤高度和宽度各异,有的位于水泥柱行间,有的则超出水泥柱截面范围,由于拖拉机手驾驶机器的行走误差,在葡萄园内清土作业时,清土部件不可避免的会与埋在土壤中的葡萄藤接触,故清土部件的材料需保证在清除土壤的同时不能损伤葡萄藤,此外,材料的耐磨性也必须可靠,关于此方面,本文只进行了初步的研究,下一步将深入分析研究清土部件材料与土壤和葡萄藤之间的相互接触作用。
5 结论
(1)设计了一种主要由机架、避障摆动机构、避障信号采集机构、控制器、清土部件、挡土板、传动部件和限深轮等组成的自动避障式葡萄藤防寒土清土机,该机器中的清土部件采用柔性刷子和橡胶组合结构,通过触杆感知自动避开水泥柱,可将水泥柱侧边和水泥柱行间的土壤全部清除干净,确定了避障信号采集机构、避障摆动机构和清土部件等关键部件的结构及参数,其中避障油缸行程为200 mm、缸径为40 mm,清土部件的回转直径为550 mm。
(2)基于多体动力学软件RecurDyn和离散元软件EDEM的耦合仿真,以机具前进速度、避障油缸速度、清土部件转速和触杆转动角度阈值为试验因素,以土壤清除率为评价指标,设计了4因素二次回归正交旋转中心组合模拟试验,利用Design Expert 8.0.6软件对仿真试验数据进行回归模型显著性分析,得出了机具前进速度、避障油缸速度、清土部件转速和触杆转动角度阈值均对仿真试验结果影响显著,以土壤清除率最大化为优化目标值,采用响应面法获得了机具的最优工作参数组合:机具前进速度0.43 m/s、避障油缸速度60 mm/s、清土部件转速550 r/min、触杆转动角度阈值10 °,在优化后的作业参数组合下再次进行仿真试验,得到理论土壤清除率为54.65%。
(3)加工物理样机,进行田间试验,采用优化后的工作参数组合进行田间作业性能测试,清土作业完成后,依据作业前后土垄横截面面积的变化,通过多点测量计算得出田间试验土壤清除率的平均值为59.73%,与仿真优化结果的相对误差为8.50%。